Robot teleoperation through Impedance Control
Objective: Develop a Control Law that works in position and force subspaces using kinematical and dynamical models in order to replicate Master Robot movement to the Slave Robot.
Summary:
- Develop Direct and Inverse Kinematical Models.
- Develop Kinematic Simulator.
- Develop Direct and Inverse Dynamical Models.
- Models Validation.
- Develop Control Law in Force and Position Subspaces.
- Conclusions.
Remarks:
- Master Robot is 6 DoF
- Slave Robot is redundant (7 DoF)
Results:
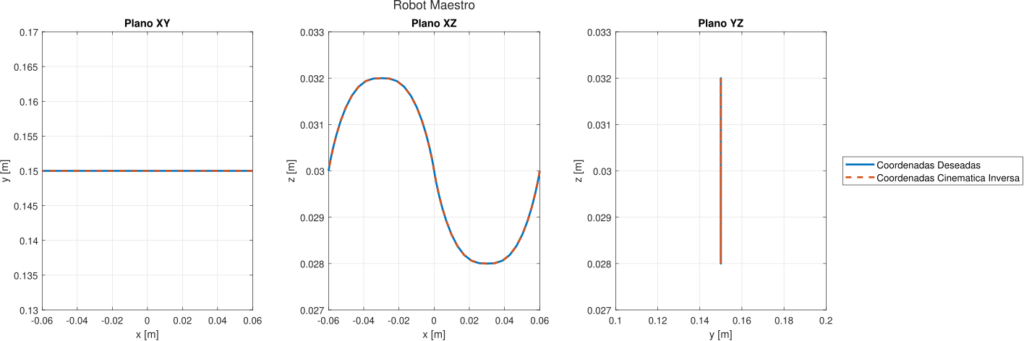
Phantom Omni (Master Robot)








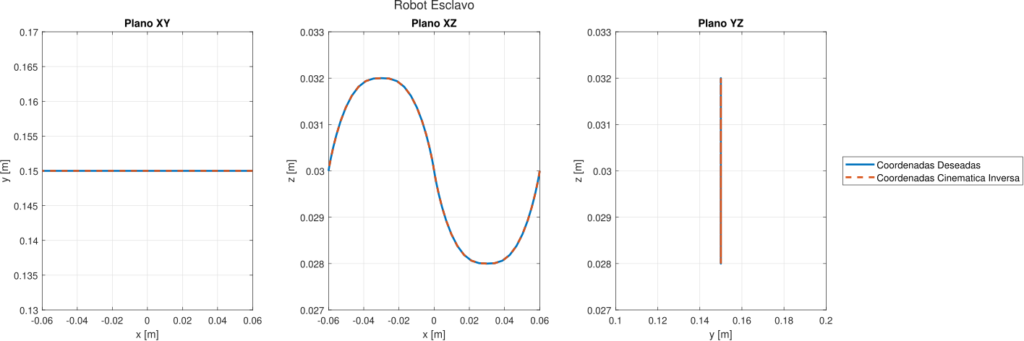
Robai Cyton Gamma 1500 (Slave Robot)
When trying to track a given trajectory with inverse kinematics algorithm of both robots, I got the following result.
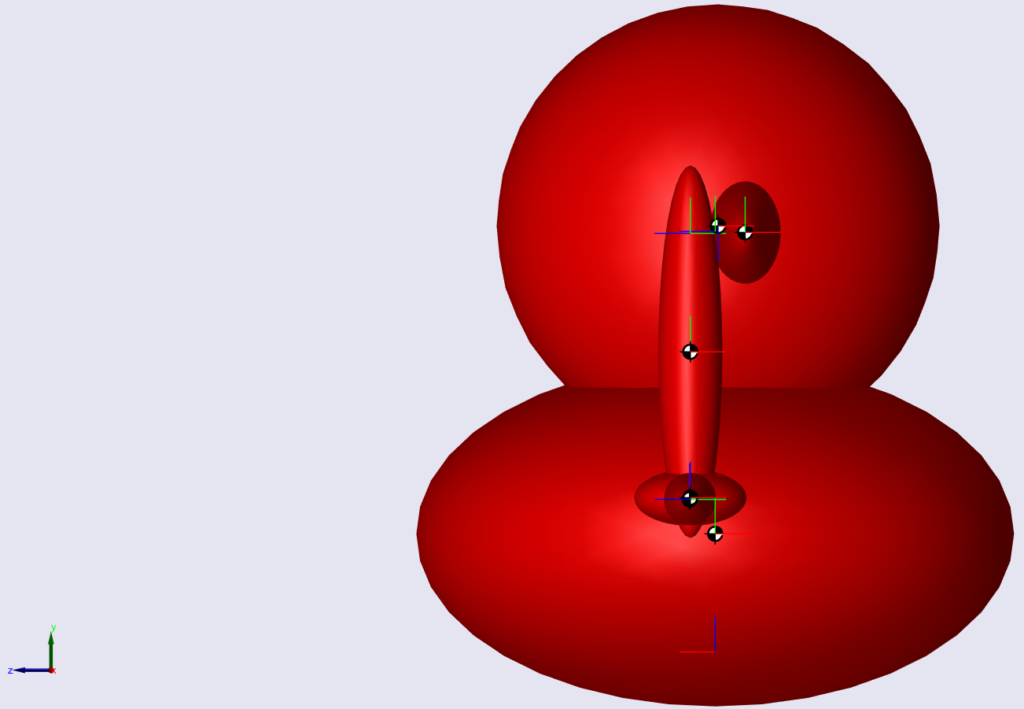
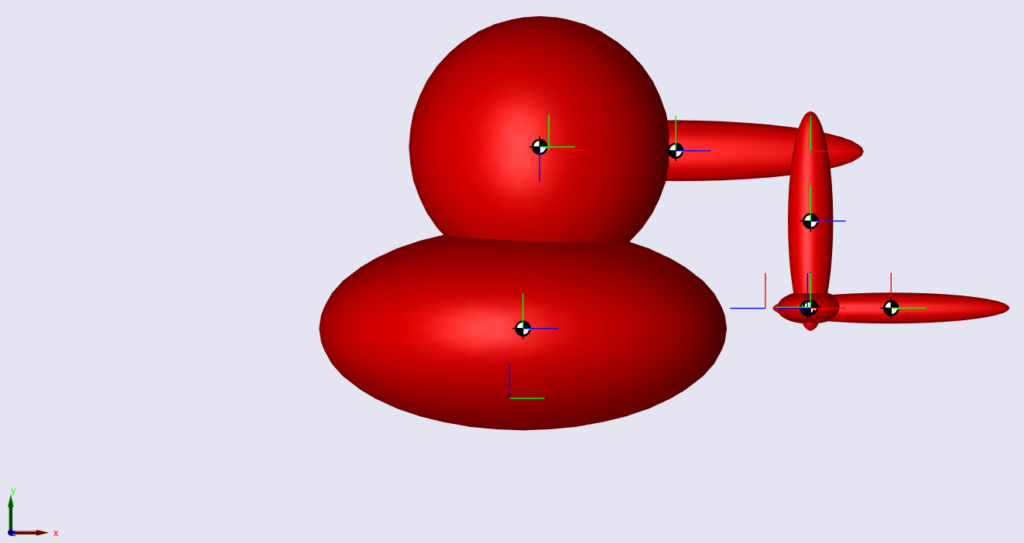
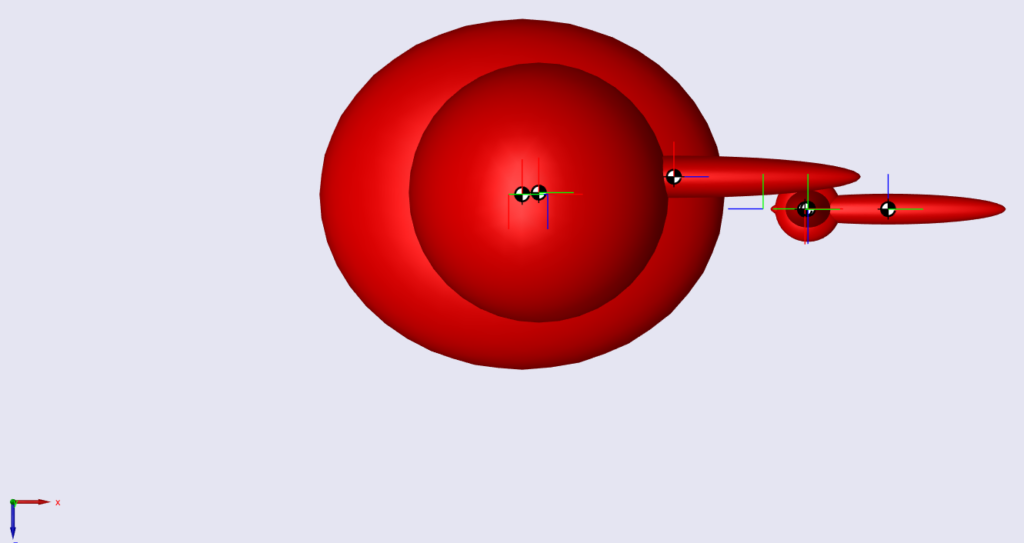
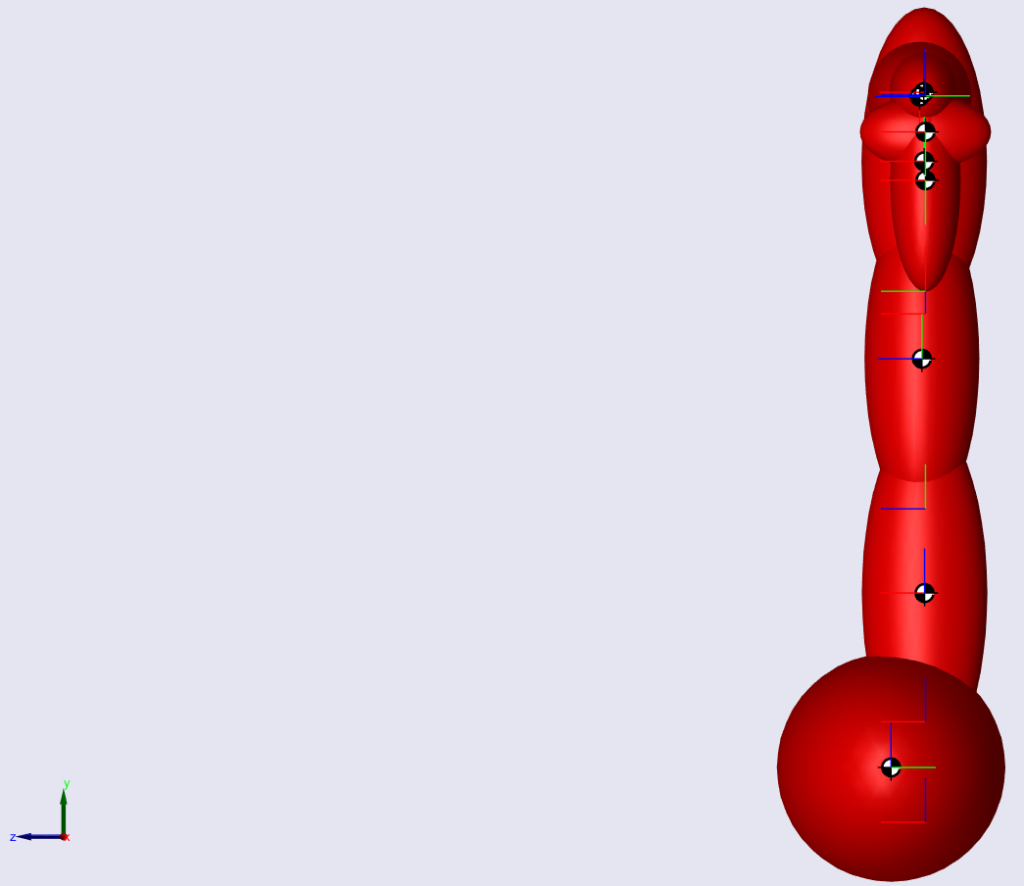
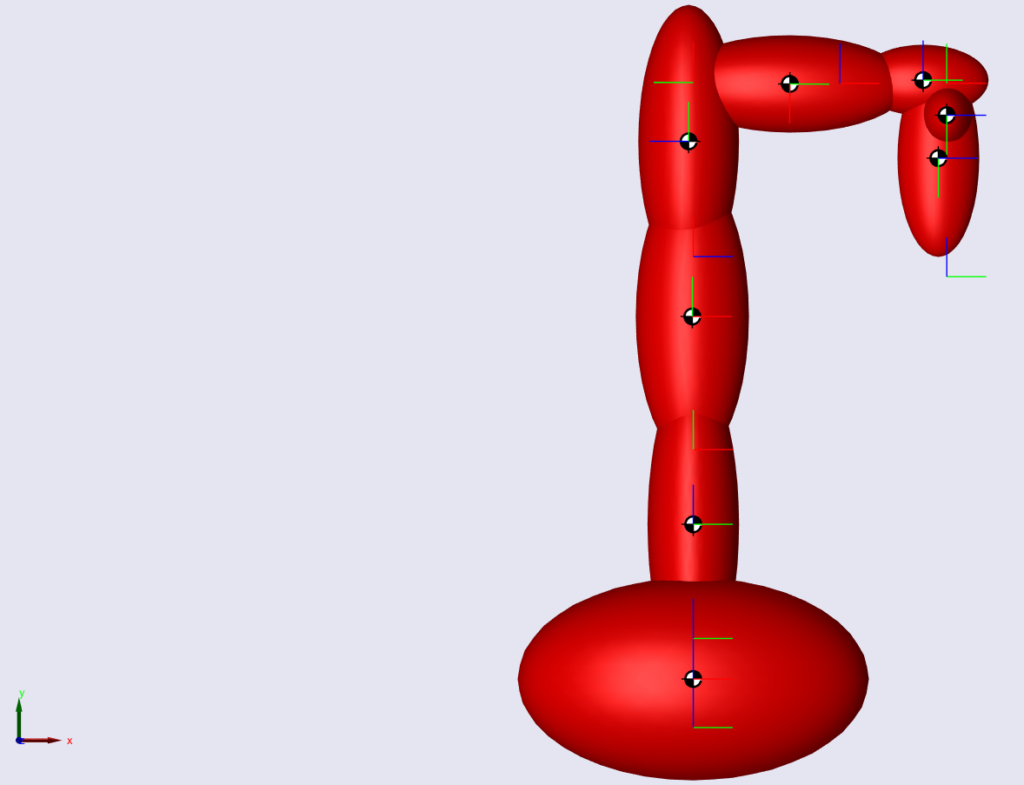
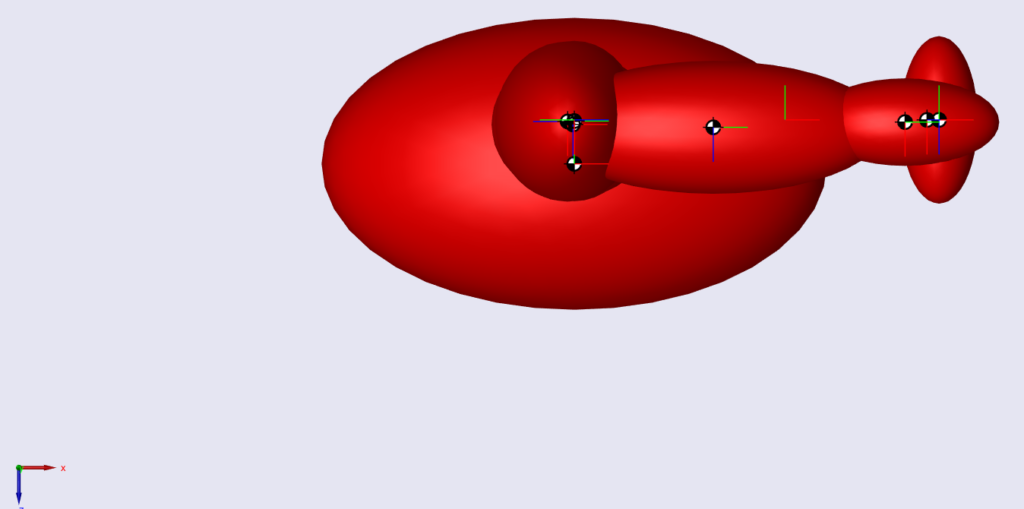
Inertia Ellipsoids of both robots are shown in the following images
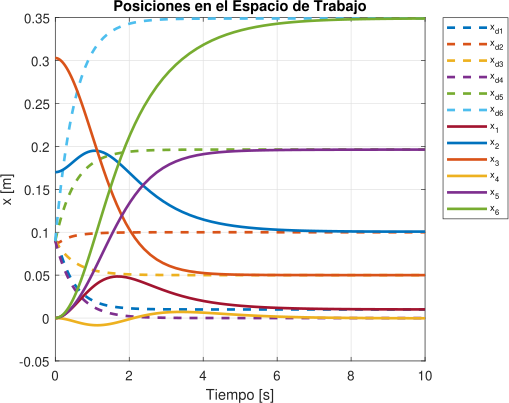
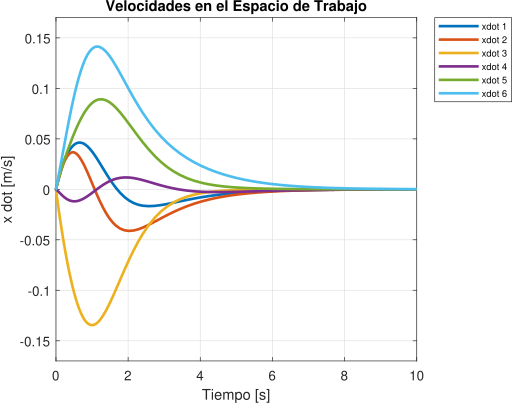
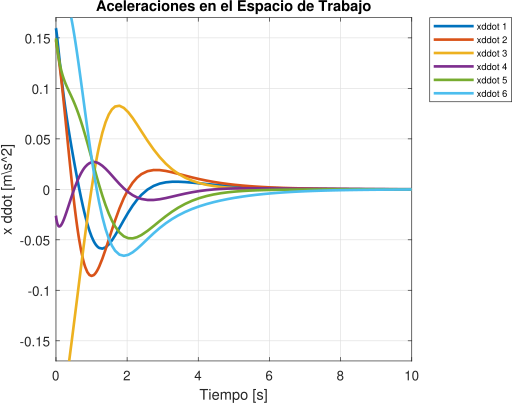
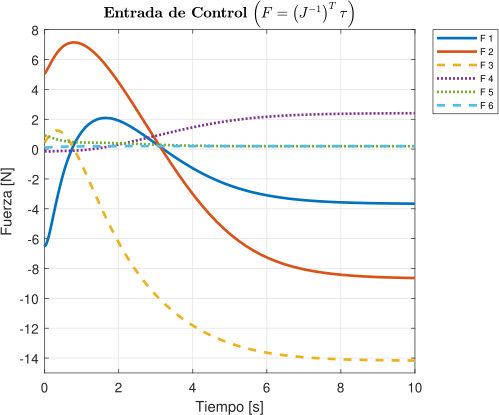
Next I’ll show dynamics result. There’s a delay in the graphs, however, it’s because I don’t have a control law acting in the simulation, it’s just the robot dynamics in open loop.
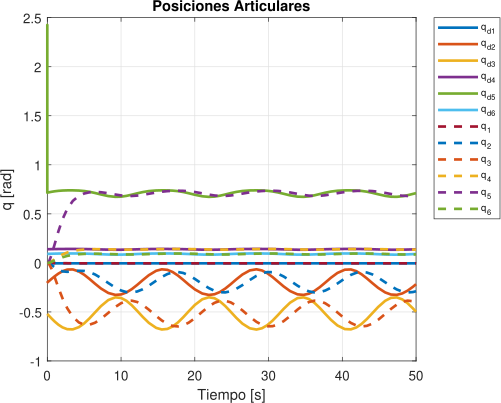
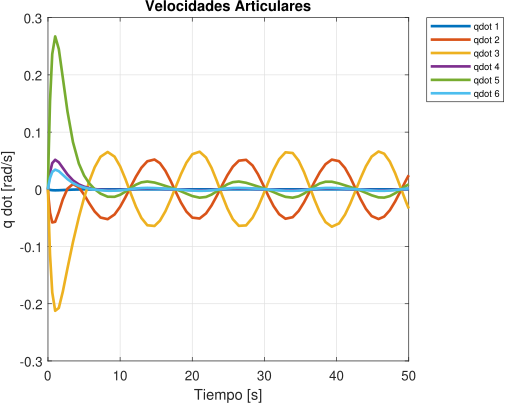
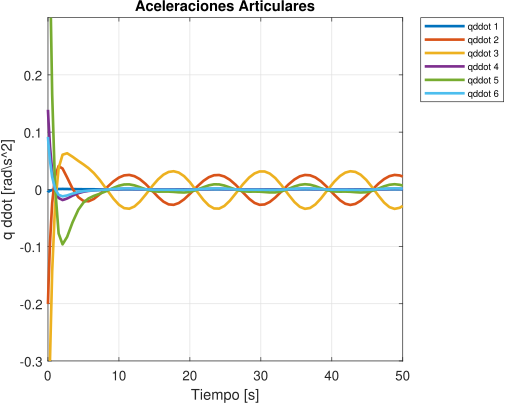
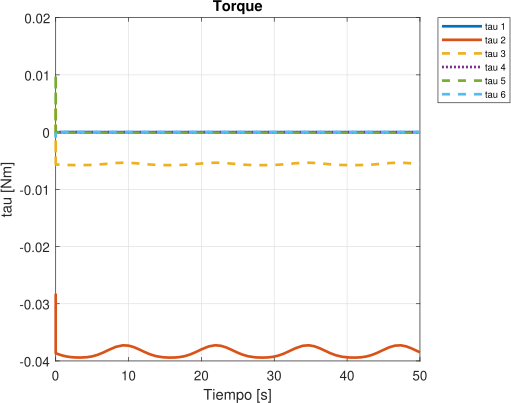
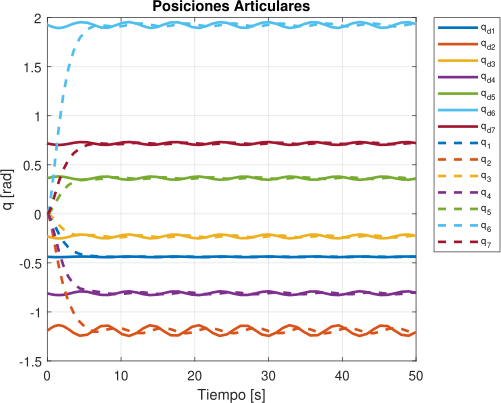
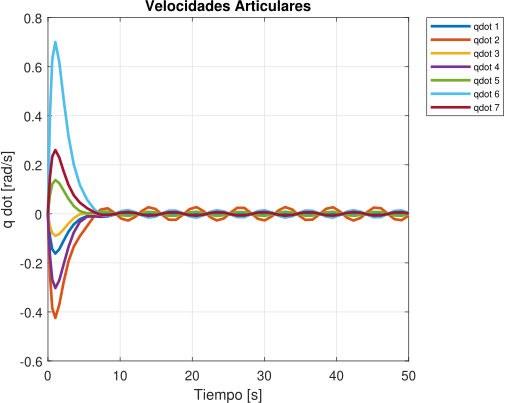
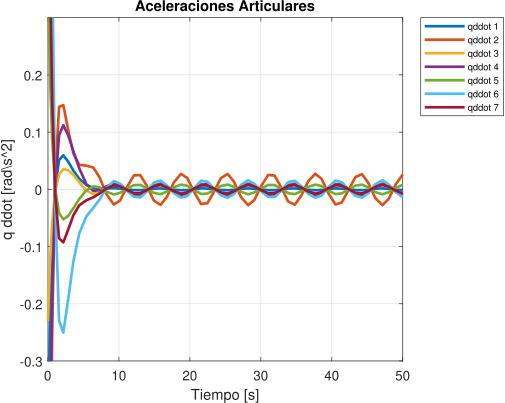
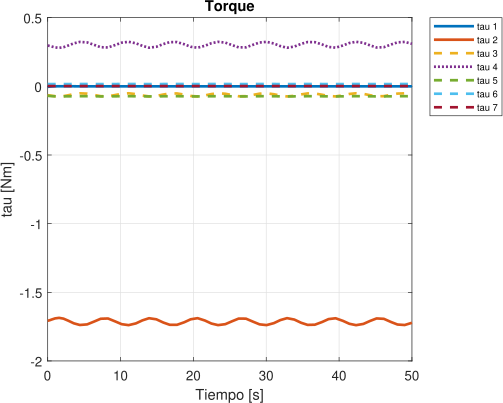
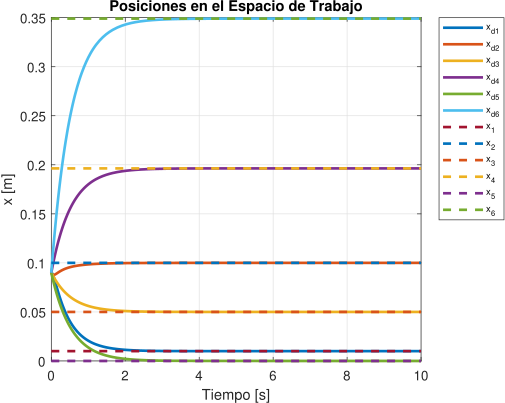
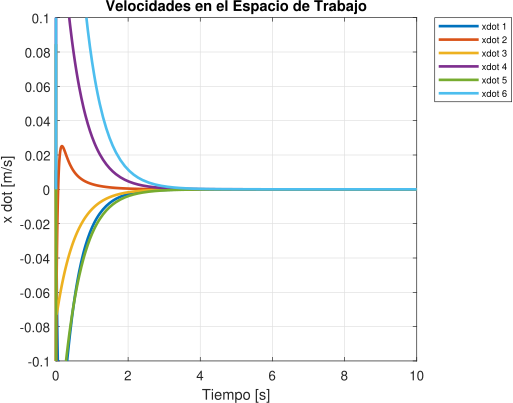
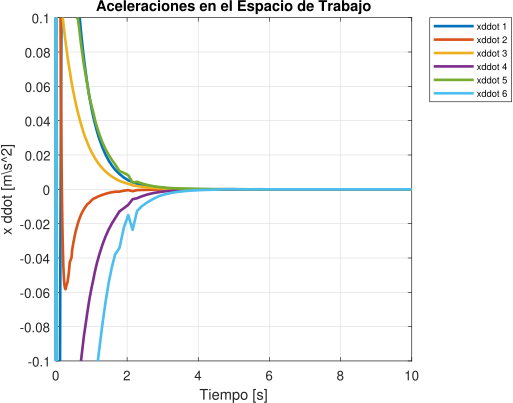
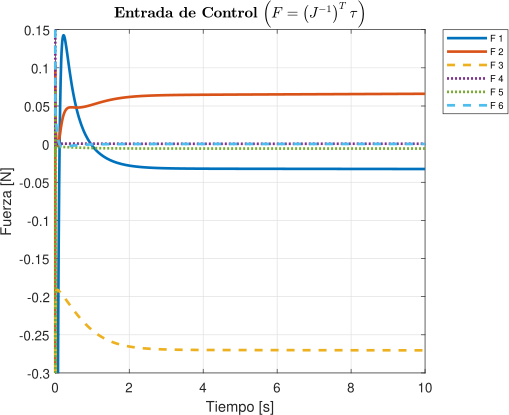
Finally, I’ll show robots dynamics with the control law. In the case of the Master Robot I have a PD with gravity compensation, and in the case of the Slave Robot I have the Impedance Controller in Task Space.