4 DoF Robotic Arm Position Control through Artificial Vision
Objective: Develop an inverse kinematics algorithm for a 4 DoF robotic arm and a digital image processing method to identify and locate a ball of a certain color in space, so the robot can actually recognize ball’s coordinates and catch it if it’s in a reachable position.
Summary:
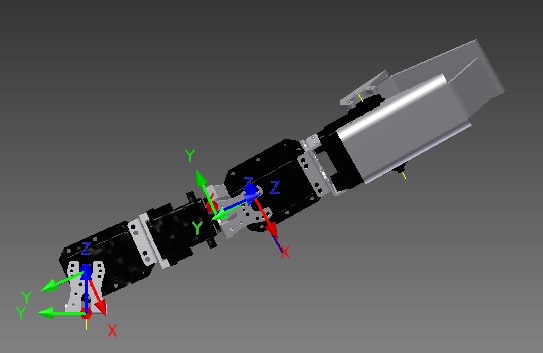
- Get robotic arm kinematics diagram.
- Develop and validate direct kinematics model.
- Develop and validate inverse kinematics model.
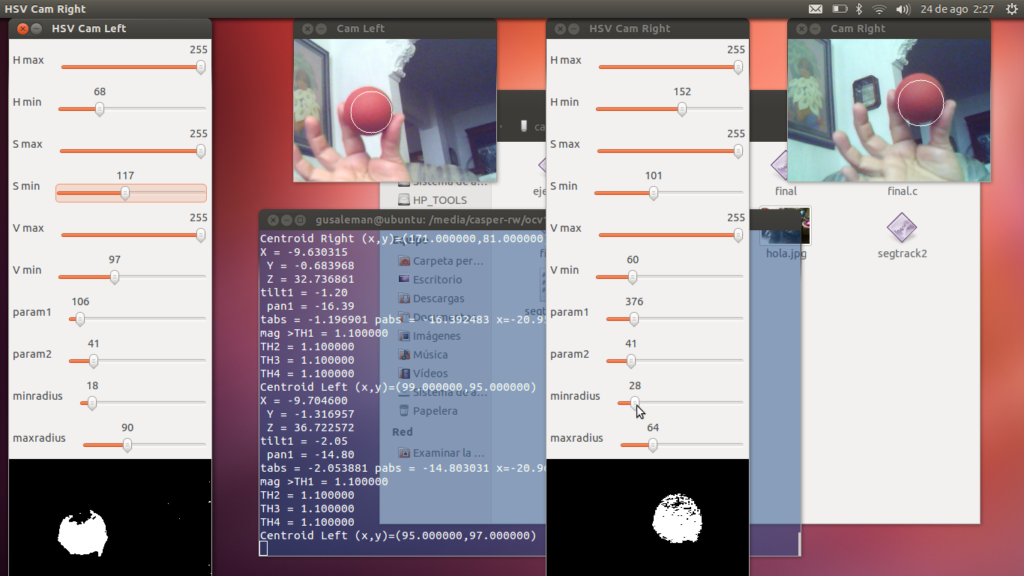
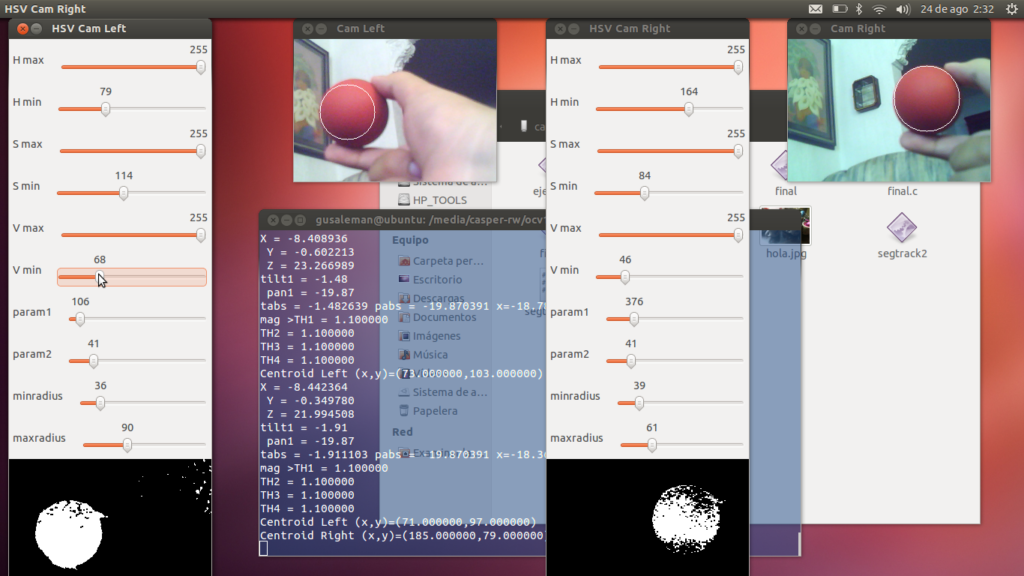
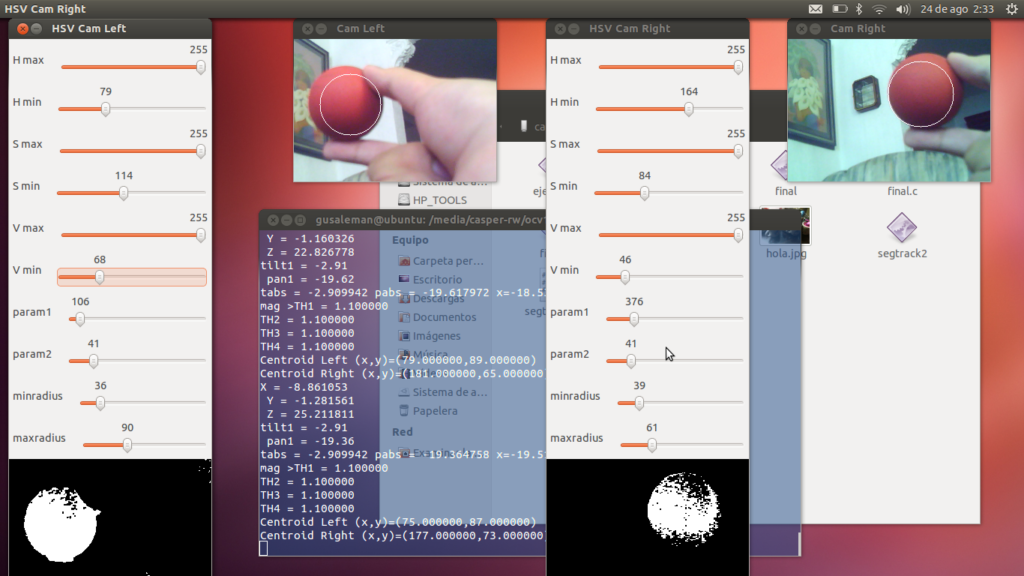
- Perform camera’s calibration.
- Perform digital image processing from cameras in order to recognize the ball and run a stereoscopic vision algorithm in order to get ball’s centroid coordinates.
- Calculate the distance from the robotic arm inertial frame to ball’s centroid coordinate in order to check if it’s inside robot’s work space.
- Develop a kinematic trajectory planning in order to catch the ball with the robotic arm.
Results: