Objective: Develop a Control Law in position for a servomechanism which can follow the given reference.
Summary:
- Develop the mathematical model for the servomechanism in order to develop a simulation environment.
- Identify the parameters of the plant in order to have a representative model of the system.
- Develop the control law for the servomechanism model, tune it and check the result.
- Test the control law with the physical servomechanism and refine controller’s response.
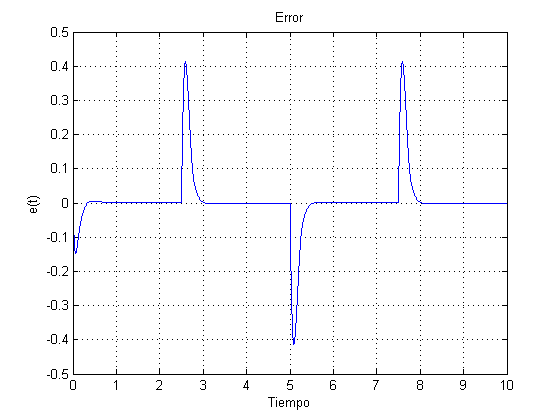
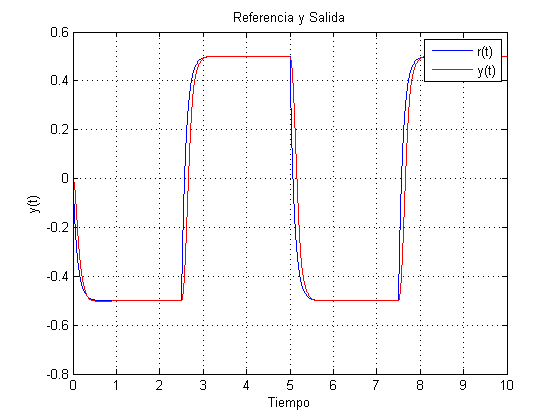
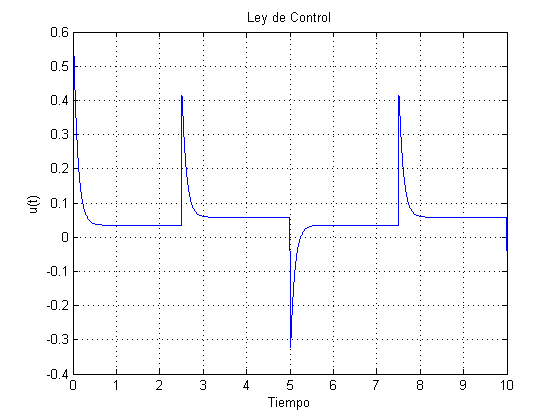
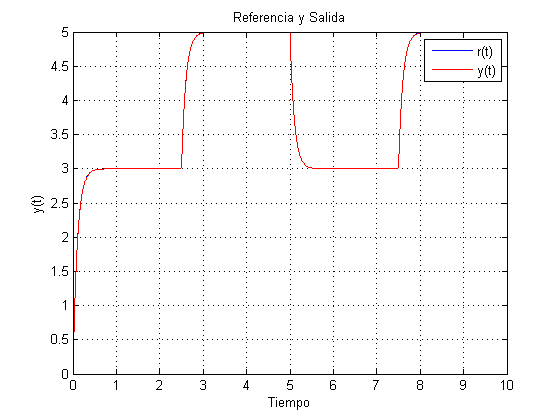
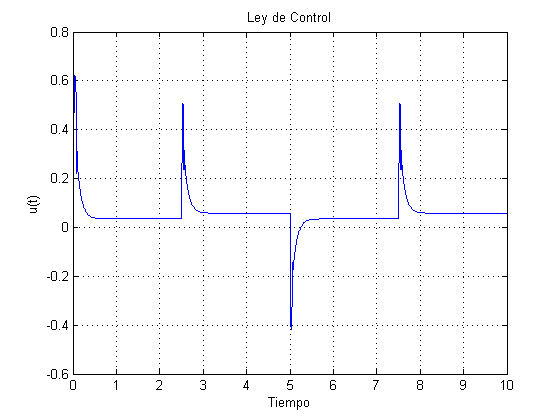
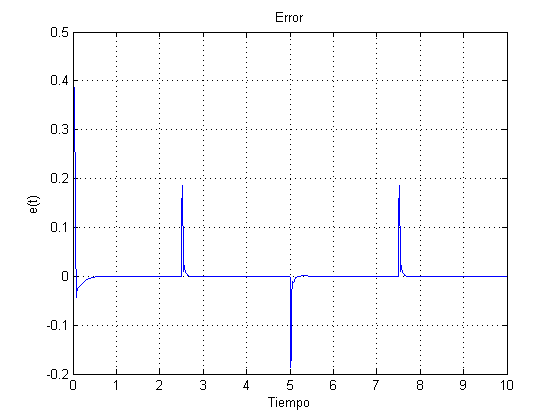
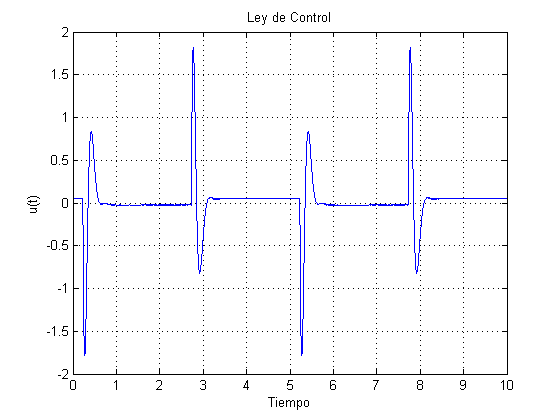
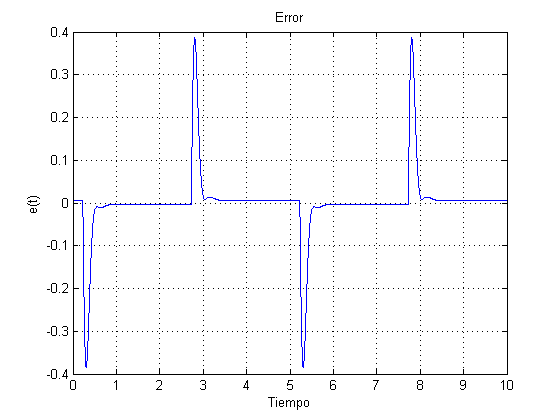
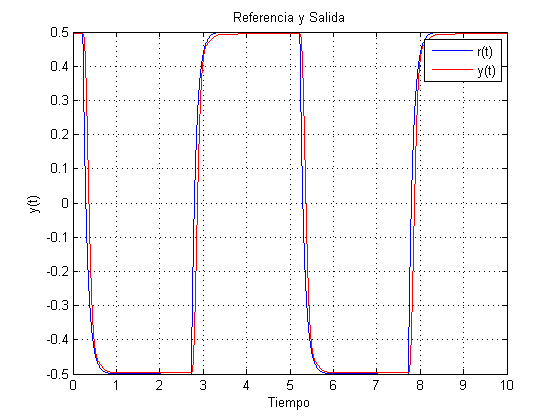
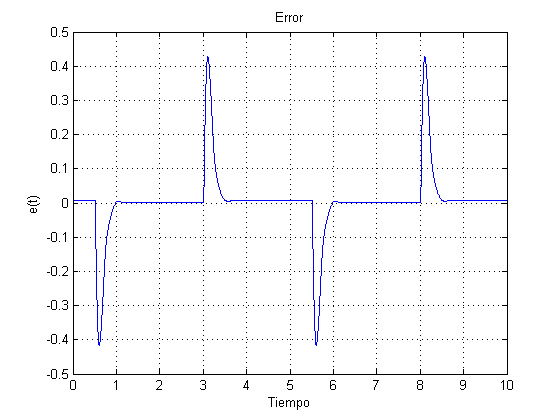
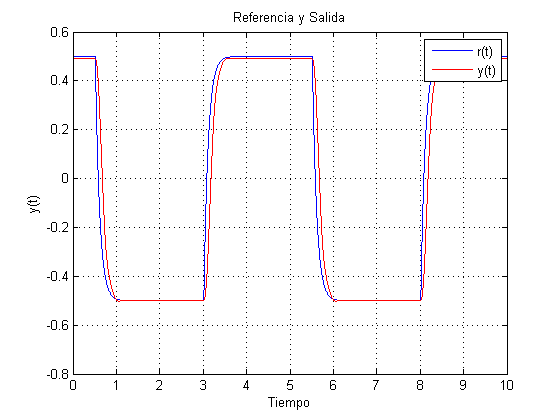
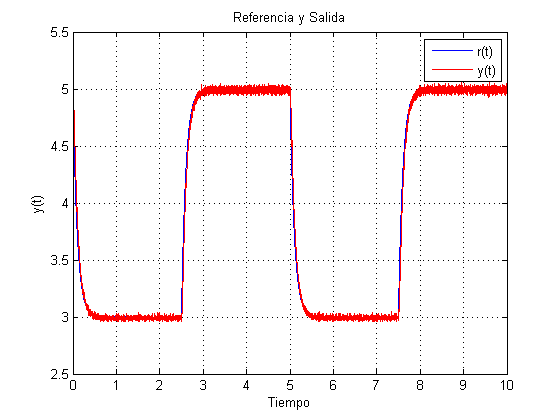
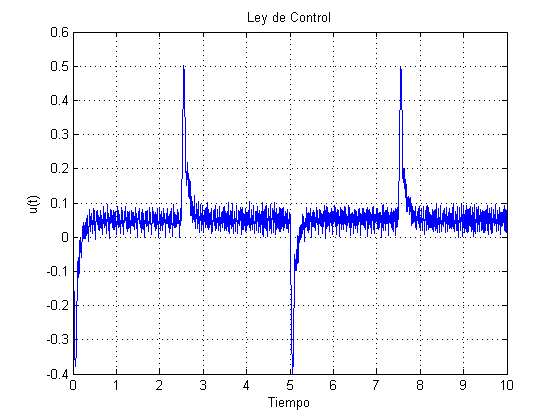
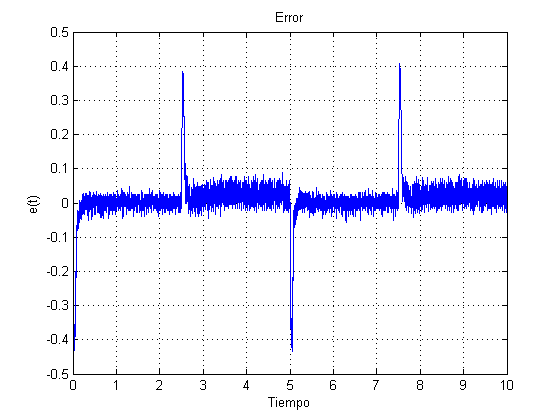
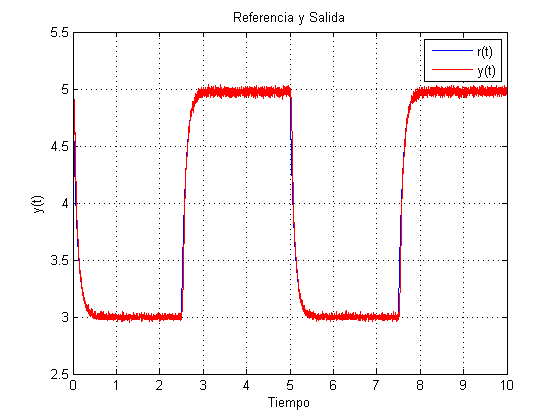
Simulation’s Results:
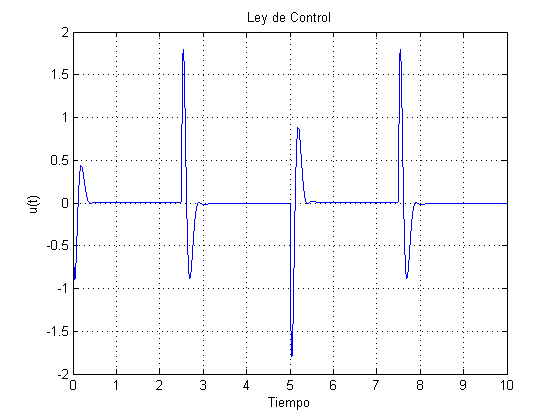
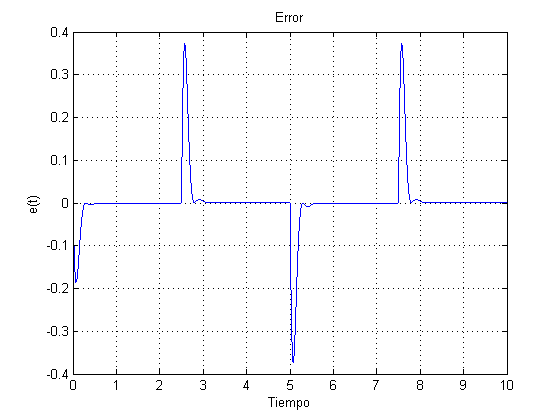
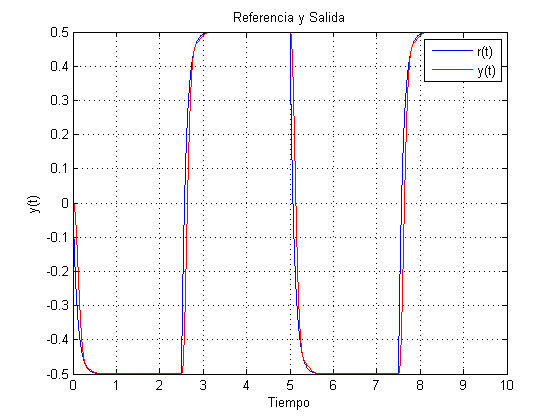
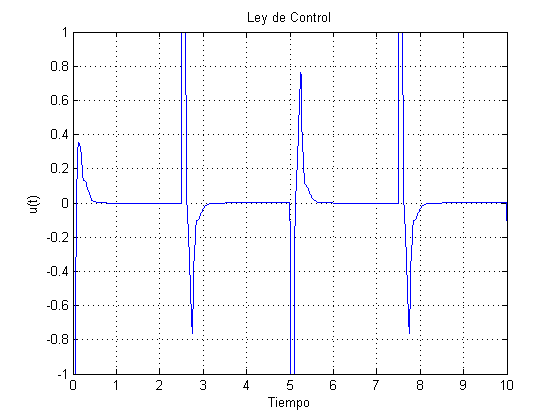
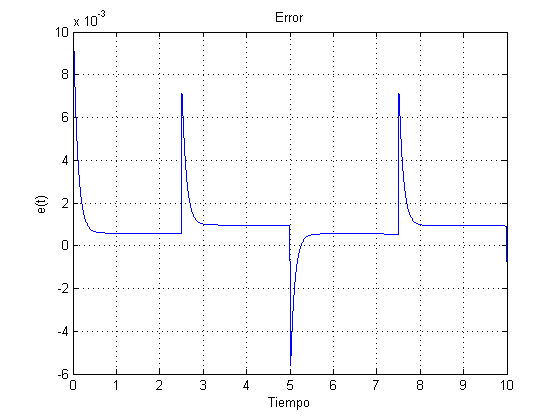
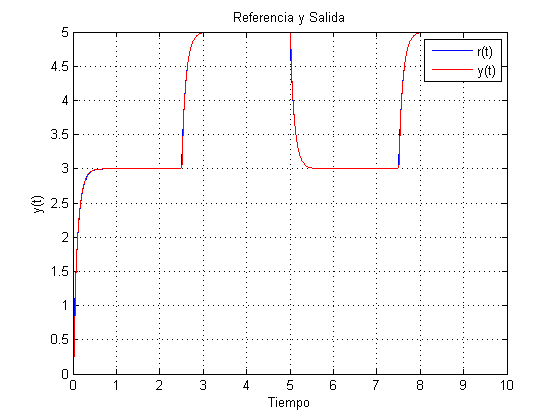
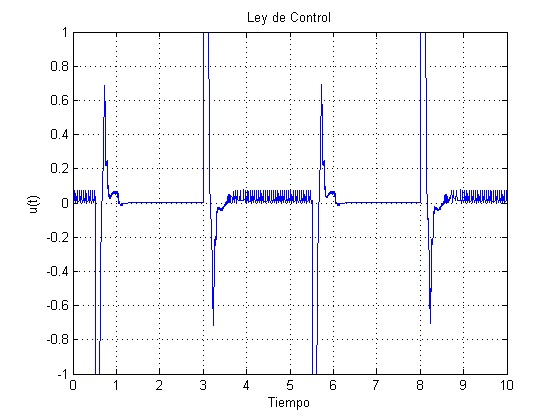
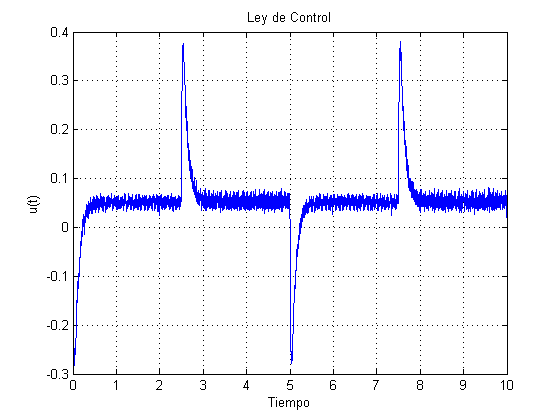
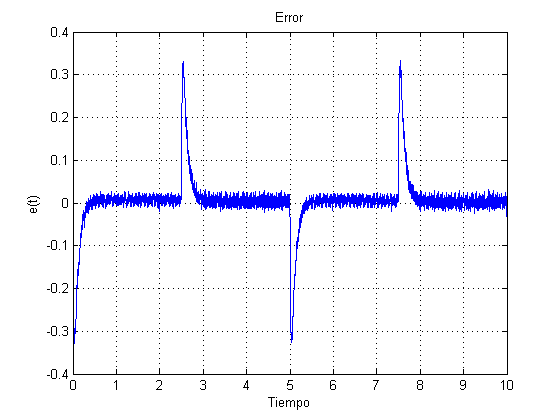
Servomechanism Results:
Conclusions:
- Every tuned controller followed the reference as desired with minimum error.
- PI and PD controllers were the ones with better results.
- Fuzzy controllers had good performance in position and speed regulation.